Extasy - Introduction

Description
Our new model for the 2010 season. Designed by Günther Aichholzer with an airfoil by Maximilian Steidle. Designed mostly for F3B task speed and distance. New airfoils M1585M to M1574M were used for the model. It has excelent stalling characteristics, good for thermal flying. Standard version has kevlar fuselage nose for usage of 2,4 GHz systems.
Dynamic Soaring version
Extasy is also now available in DS (Dynamic Soaring) version.
- empty weight from 2800g
- double ballast tube in wing
- massive carbon reinforcement of all parts
- possibility 1800g additional ballast in brass (full wing and wing joiner)
- price for model from 1490 euro

Extasy - Details

| Category: | F3B |
| Concept: | Two part wing, two part elevator, v-tail |
| Wing span: | 3018 mm |
| Length: | 1507 mm |
| Wing area: | 57,55 dm2 |
| V-tail angle: | ~ 101° |
| V-tail area: | 5,60 dm2 |
| Wing airfoil: | M1585M-M1574M |
| Elevator airfoil: | M08 - SD8025 |
| Weight: | from 2050g |
| Ballast: | 1200g |
| Maximum servo width: | wing center: 12 mm (Futaba S3150 or Graupner DS 3288) , wing tip: 10 mm (Futaba S3150), fuselage: 12 mm (Graupner 3871) |
| Construction: | |
| Wing | carbon-rohacel-glass or carbon-rohacel-carbon |
| Spar | UMS Carbon |
| Tailplane | glass-rohacel-glass |
| Fuselage | carbon-glass-kevlar |
Drawing

Extasy - Settings
Settings table for Extasy by Güenter Aichholzer
| Trim positions | Flaps | Ailreons | Elevator | Rudder | ||
| Normal | 0 | 0 | 0 | 0 | ||
| Thermal | 3 down | 3 down | 1 up | 0 | ||
| Speed | 1 up | 1 up | 0 | 0 | ||
| Start | 13 down | 13 down | 1 up | 0 | ||
| Butterfly | 50 down | 20 up | 5 down | 0 | ||
| Deflections | Flaps | Ailreons | Elevator | Rudder | ||
| Distance | 6/5 | 20/12 | 7/4 | 10/10 | ||
| Thermal | 0 | 25/0 | 7/4 | 10/10 | ||
| Speed | 5/4 | 20/14 | 6/4 | 0 | ||
| Towhook: 128 mm from end of cabin to front of hook. | ||||||
| Center of gravity: from the leading edge 100 mm | ||||||
| up deflection/down deflection in milimeters | ||||||
Settings templates
Extasy ailreon settings template Extasy flap settings template Elevator settings templateExtasy - Mounting
ballast
 |
 |
| ballast for wing joiner (150g each) | ballast for wing (1200g) |
improved RDS
 |
 |
 |
 |
 |
| RDS horn | RDS parts frame and horn |
RDS comlete, horn in bearing |
connection to servo | new reinforcement RDS pocket |
v-tail driving system
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
||
 |
|||
Extasy - Performance analysis
At the beginning...
Our first experience with the XFLR 5 program was with the previous F3B model Evolution. When we designed the new model Extasy, we used our experience with this program again. The program can be used for determining the center of gravity and the angle difference between wing and elevator. Besides now we can compare the design of Evolution and Extasy in XFLR 5 and see the differences of both models in flight characteristics.
The Extasy was originally developed by Günter Aichholzer and airfoil by Maximilian Steidle as a faster version of the Evolution for better results in F3B tasks speed and distance. To achieve that the (aoa) angle of attack of the wing and angle between aoa wing and aoa elevator (v-tail) is very important. The value of the wing aoa is usually set from 1,5 degree (for more thermic-slower models) to 0,5 degree (faster-slope model). When the wing aoa is selected, then we must be find out the elevator aoa. The value of this angle depends on many conditions. There are two ways to find out this value. First way is method of trial and error, manufacturer tests model with many different values of elevator aoa. When the correct value is found, it is used on the final model. This may take some time and the result is unknown. Sometimes it is better to start at the beginning with a new value of wing aoa. Second way is to simulate flight characteristics before the model is even created. This gives us the opportunity to test many diferent configurations and select the right one to realize.
 |
 |
 |
 |
| Extasy perspective view in XFLR5 | Extasy back view in XFLR5 | Extasy left view in XFLR5 | Extasy top view in XFLR5 |
Summary results
When the model Evolution was made, we did not know about the program for the analysis of flight characteristics - XFLR5. Later we found this program and recreated the model Evolution in it. It turned out that the calculated flying properties of the model were very close to reality. In particular, the speed at which the model flies when control surfaces are neutral. To accelerate the model Evolution (for task distance and speed) it was necessary to push the elevator down by 0.6 mm. This property is also confirmed in the simulated model XFLR5. The new model Extasy was designed to avoid the need to suppress the elevator for a faster flight. With this the model achieves better performance in tasks of speed and distance. Velocity of the Extasy with control surfaces in neutral position was determined by the Evolution with suppressed elevator, which is about 16-18 m/s. The real Extasy model showed that indeed it is no longer needed to push down the elevator.
 |
| The terms used below |
The program also revealed the flow interference between the wing and elevator. This interference causes the unusual behavior of the model at high angles of attack. When normal models lose speed and become non-steerable. Extasy on the contrary, shows to be very stable even at high angles of attack of the wing, such as in thermals. This table shows the percentual changes in flight performance of different model weights, according to the following graphs.
| Extasy - summary of flight characteristics | ||||||
| model weight [g] | stall speed [%] | minimum descent | maximum glide ratio | trim speed [%] | ||
| speed [%] | descent rate [%] | speed [%] | glide ratio [%] | |||
| 2050 | 100 | 100 | 100 | 100 | 100 | 100 |
| 2400 | 107,3 | 107,4 | 105,0 | 109,5 | 104,1 | 109,4 |
| 2800 | 115,9 | 117,0 | 112,5 | 119,0 | 107,8 | 118,1 |
| 3000 | 120,7 | 122,3 | 115,0 | 125,7 | 109,0 | 122,0 |
| 3200 | 125,6 | 125,5 | 117,5 | 133,3 | 111,4 | 126,0 |
| 3400 | 128,0 | 129,8 | 120,0 | 141,0 | 113,5 | 130,7 |
Detail model performance
The results of the calculations are not verified by measurements on the model. All graphs shown here are based on the calculations by XFLR 5, which does not take all influences on the model into account. This is important when working with this information, the absolute values will not be as in reality. More useful information is provided by the graphs when the individual parameters at different model weights are compared.
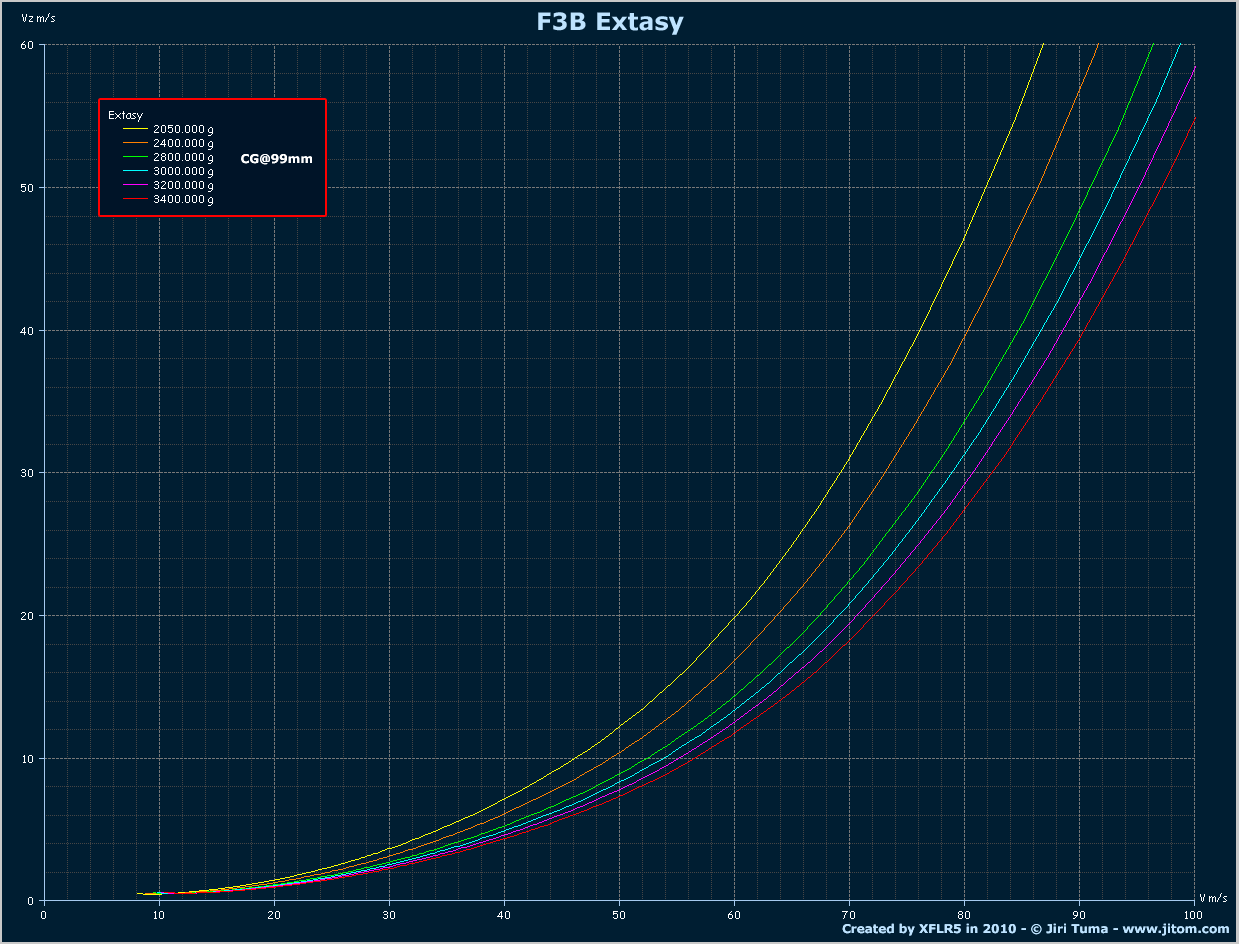
Descent rate
The following charts show the relationship between model speed and model descent rate for different weight of model. This applies for direct flight, in turn on base are present further losses, which increase descent rate. It shows, for task speed, more model weight means a better result.
 |
 |
 |
 |
| Full scale velocity | Low velocity | Medium velocity | High velocity |
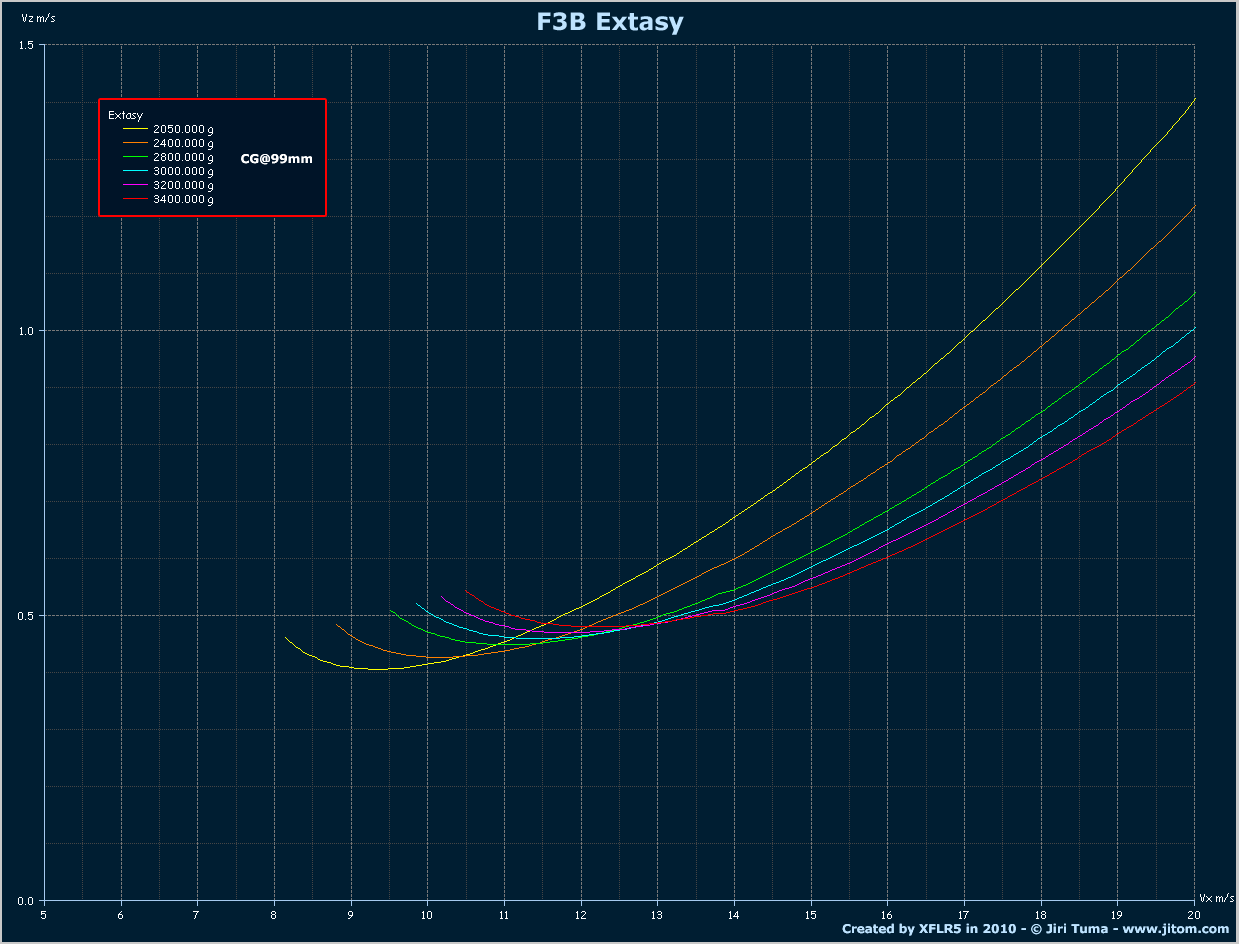
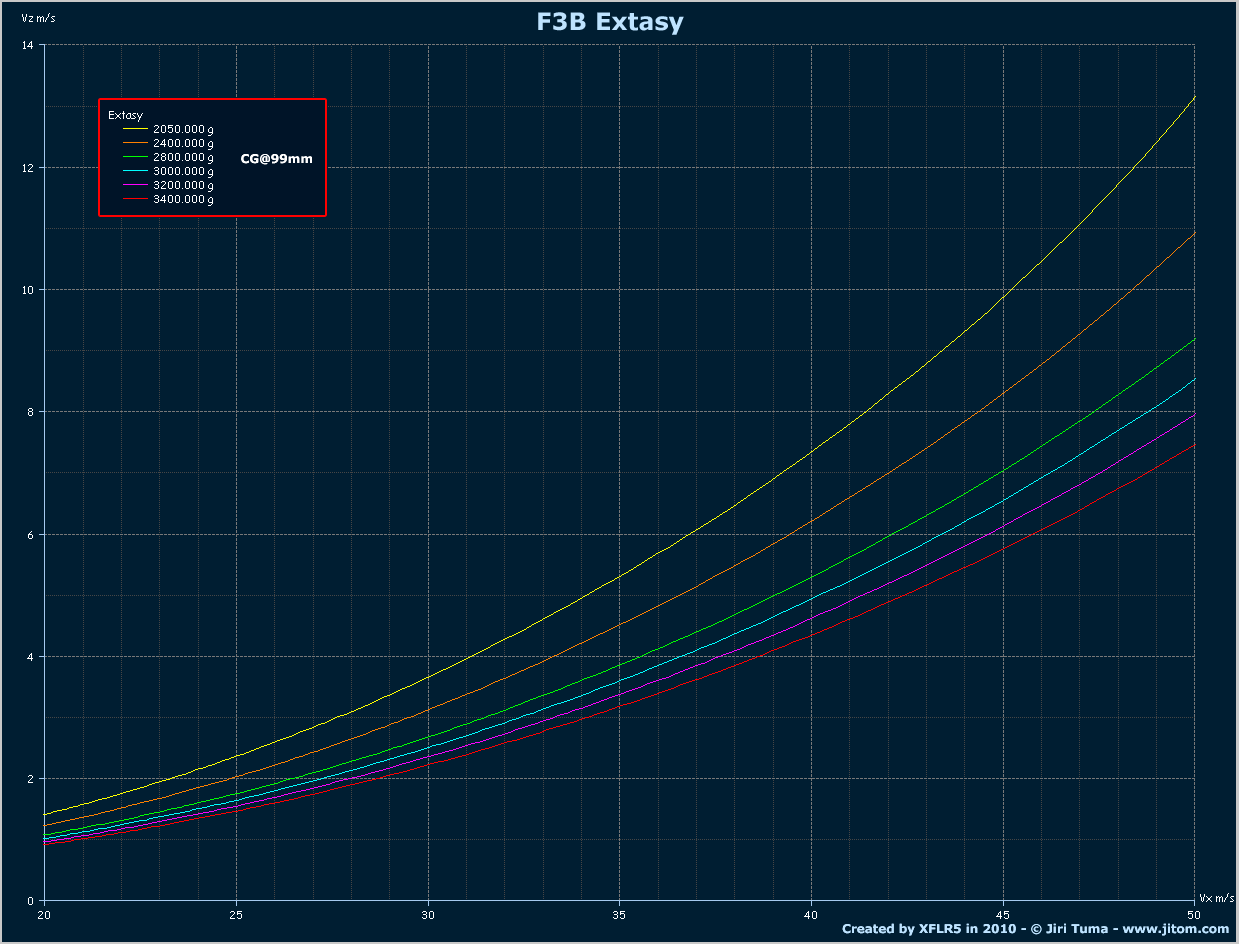
Forward speed
Speed relative to the surface (speed of model between bases on ground). Graphs show the relation between forward speed (Vx) and descent speed of the model (Vz). Increase model weight and decrease model descent speed. This applies for direct flight. Wind increases or decreases forward speed.
 |
 |
 |
| Forward speed at low velocity | Medium velocity | High velocity |
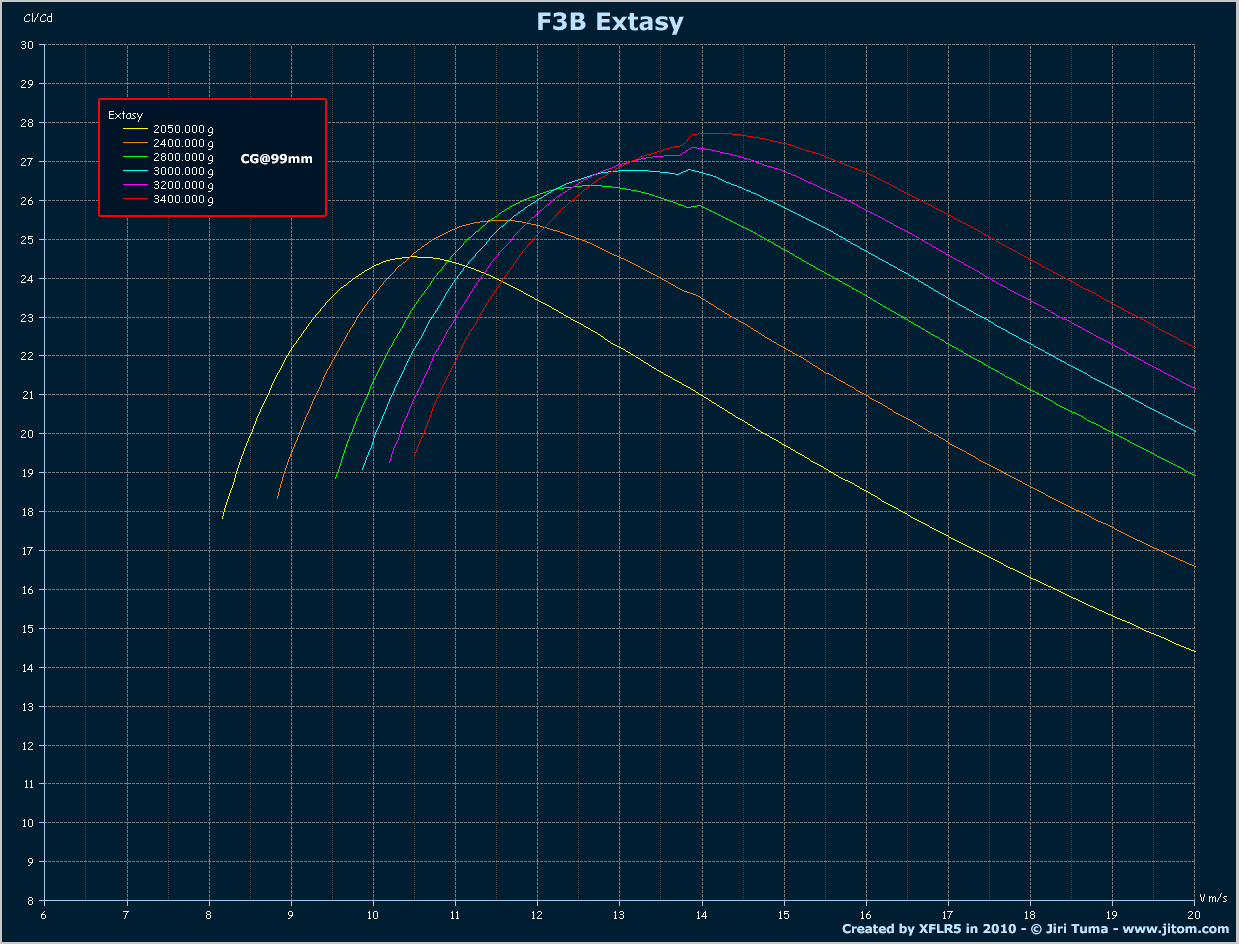
Glide ratio
Is in simplicity the ratio between forward speed and descent speed of the model. Glide ratio is different for each flying speed of model and weight of model.
 |
 |
 |
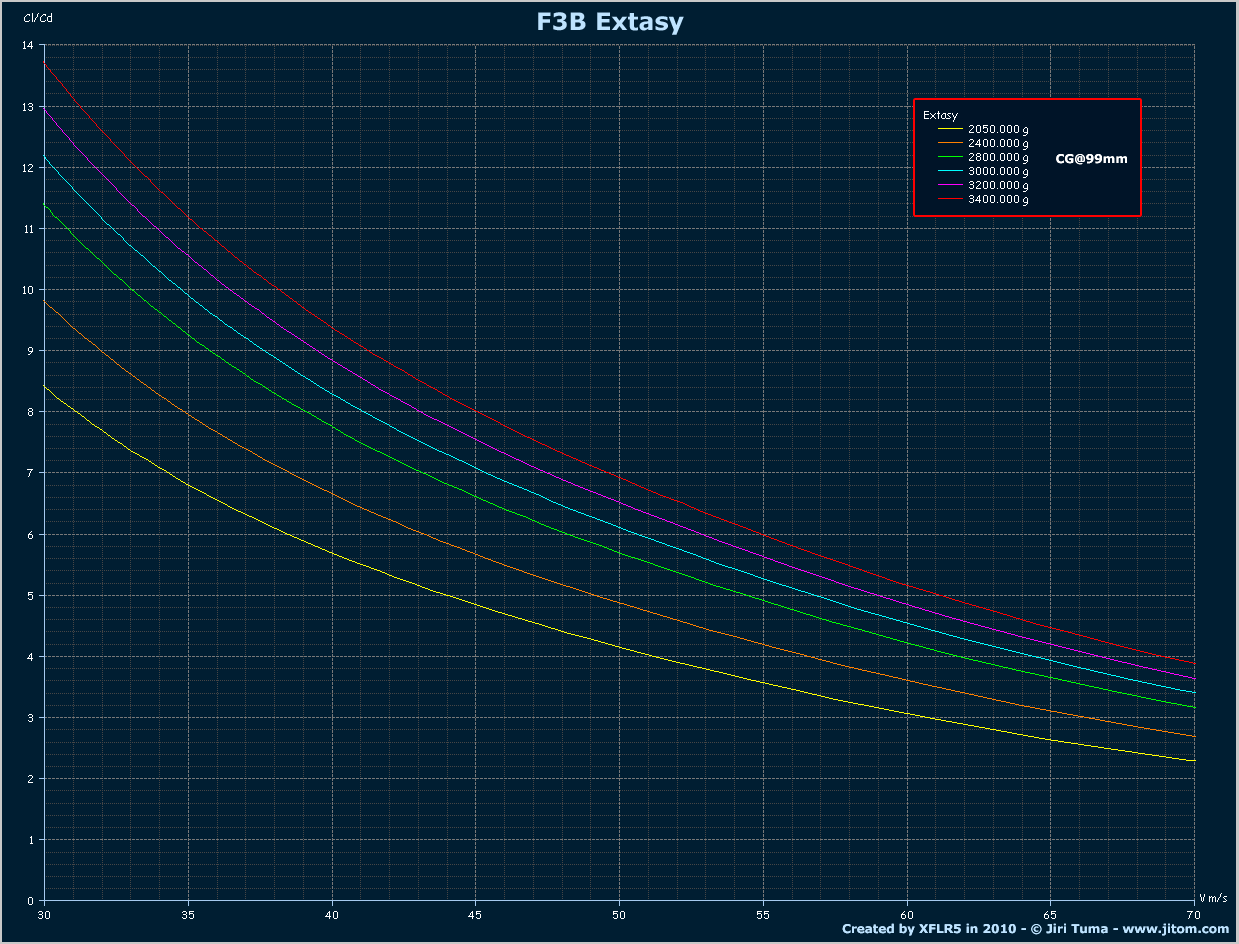 |
| Full scale velocity | Low velocity | Medium velocity | High velocity |
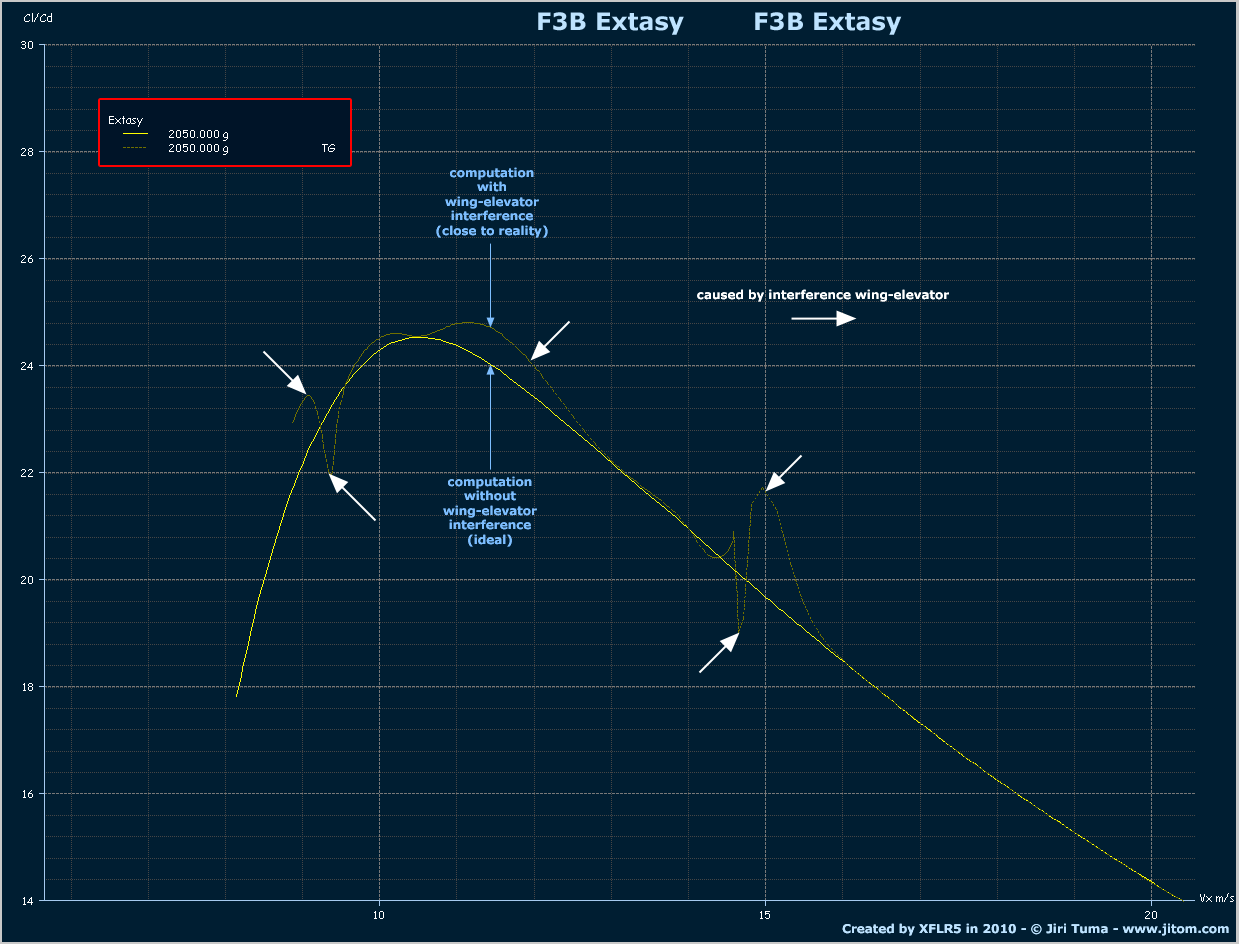
Trim speed
Trim speed - all control surfaces (elevator,aileron, flaps) are in neutral, then model has a stable speed where the curve intersects x-axis on graph. For Extasy interference wing-elevator causes trim speed graph is more complicated.
 |
 |
 |
| Simple trim speed graph | Interference wing-elevator affect glide ratio | Trim speed include interference wing-elevator |
Compare Extasy and Evolution characteristics
 |
 |
 |
 |
| glide ratio for Vx=8m/s to 20m/s | glide ratio for Vx=20m/s to 40m/s | glide ratio for Vx=40m/s to 65m/s | descent speed for Vx=8m/s to 16m/s |
Visualisation (interference wing-elevator), drag distribution, lift distribution, pressure and stream lines
 |
 |
 |
 |
| Drag distribution at 12,1 m/s | Lift distribution at 12,1 m/s | Stream lines visualisation at 11,2 m/s | Stream lines visualisation left view at 12,1 m/s |
 |
 |
 |
 |
| Drag distribution including wing-elevator interference at 12,1 m/s | Lift distribution including wing-elevator interference at 12,1 m/s | Stream lines visualisation including wing-elevator interference at 11,2 m/s | Stream lines visualisation left view including wing-elevator interference at 12,1 m/s |
 |
 |
 |
 |
| V-tail pressure distribution at 11,2 m/s | V-tail pressure distribution including wing-elevator interference at 11,2 m/s | Pressure distribution at 11,2 m/s | Pressure distribution including wing-elevator interference at 11,2 m/s |
 |
 |
 |
 |
| Stream lines visualisation in perspective view at 8,9 m/s | Pressure distribution at 50 m/s | Pressure distribution at 50 m/s left view | Pressure distribution at 50 m/s perspective view |
Extasy - Color design
Custom color scheme designer - version 2.0
Extasy - Color design ver. 2010
Custom color scheme designer - version 2.0
Extasy - Pictures


































Extasy - Prices
Pricelist, model versions and order
